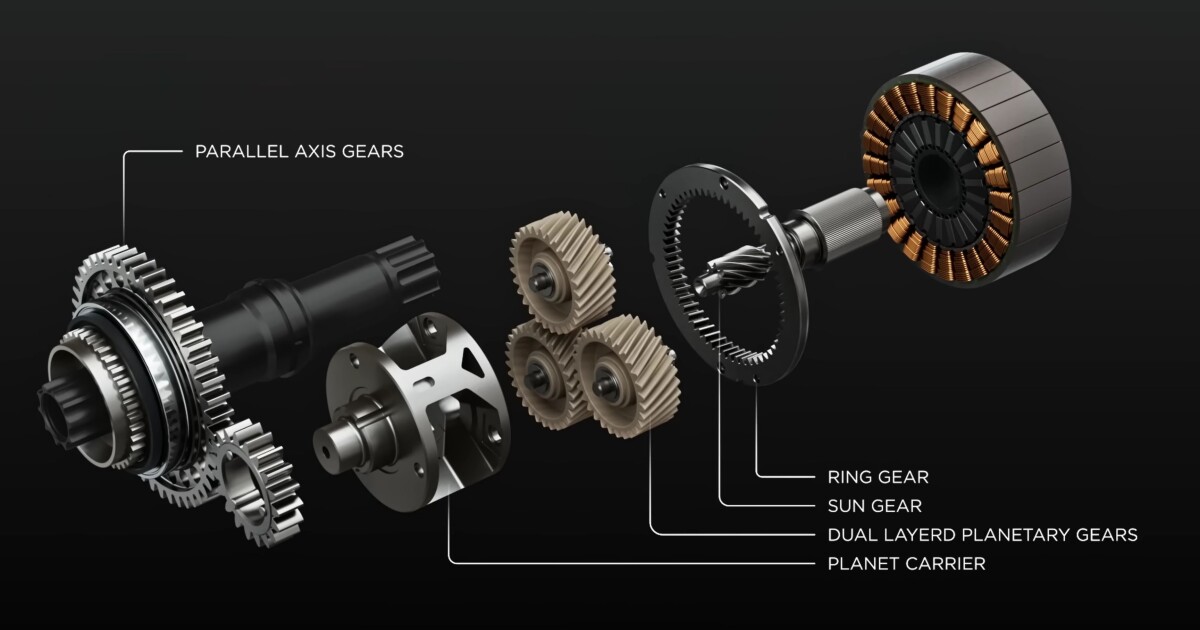
DJI, which nearly everyone knows as the drone company, made the jump into the electric mountain bike (eMTB) sector this year with the DJI Avinox Drive System. We just wanted to show you the clever inner workings of the setup, which brings some unique features to the table.
It’s a pretty standard arrangement from what I can tell.
For reference, Bosch, Yamaha, and Shimano all have eMTB motors putting out 62.7 lb-ft (85 Nm) max torque.
This might be more related to legal power limits and less that they can’t figure out how to reduce a motor.
A design that stood out for me in this space was Dave’s Tangent which developed something like 200Nm with 80:1 cycloidal reduction in 2.8kg.
I think you’re spot on, since using a random power/torque/rpm calculator online, an 85 Nm mid-drive motor rotating at a reasonable crank cadence of 80 RPM yields a power output of 710 W. That’s just shy of the max power regulation in the USA for ebikes, at 750 W. And motors can definitely go faster than 80 RPM.
Mid-drive motors could probably be built with even more torque, but because electric motors maintain near-constant torque through most of their RPM range, the motor controller would have to perform more current limiting at the higher RPMs to stay under the legal power limits. So there’s less benefit, unless someone really badly wants more low-RPM torque.
At that point, though, other parts of the bicycle drivetrain might start disintegrating under such forces.
My Tangent snapped a Shimano XT chain in less than 1000km. I think that system could reach 200Nm peak torque. If I remember correctly it could peak over 2.5kW when unlimited. I had to switch to stronger chains and limit the torque to stop it from eating metal. That’s easier these days since there are stronger ebike-specific drivetrain components from Shimano and others. 😂 But I don’t ride that anymore.
“Tiny”, 800 W monster. Same power as a vacuum cleaner.
More torque sounds great, but I imagine current ebike components are designed for the amount of torque they are expected to be under now.
For this to work well, all the bits on the receiving end of the extra torque need to be prepared for it.
I have a e-bike kit with a chain that skips under the torque of electric motor but not normal pedaling. It’s proven difficult for local bike shops and myself to diagnose as it can’t be reproduced on a bike stand where the wheel spins without resistance. Something about high torque is the trigger.
Shimano LINKGLIDE cassette and chain should be able to handle that much torque and more. It’s got more metal where needed and is a bit heavier as a result. You should try it.
New Shimano XT can take 200Nm for a bit but it gets eaten relatively quickly if you keep running that much torque through it.
Importantly, most drivetrains have to be able to handle 200-ish Nm of torque because that’s what gets applied when you ride standing up. However the ones intended for human use don’t handle that torque continuously. Every time you run that much torque through it, the metal surfaces wear out significantly more so after some wear, you get abnormal behavior.